Neuroscience Applications
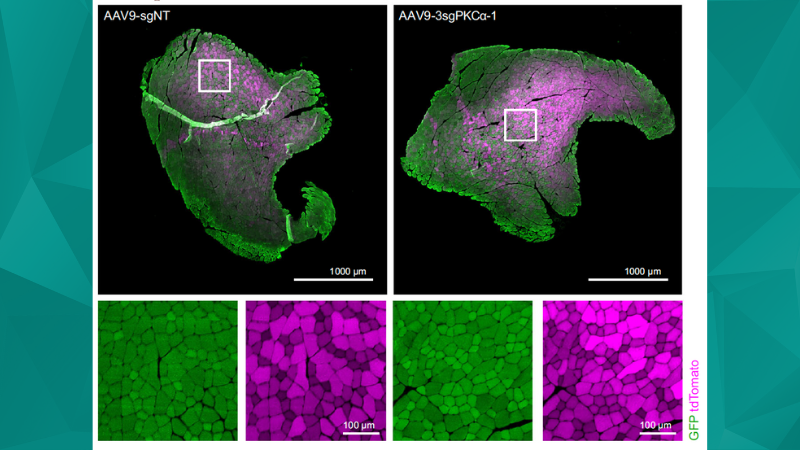
Aurora Scientific has developed innovative test systems used in olfactory research to validate odors presented to specimens and to track pheromone and plume dispersion. In addition, Aurora Scientific utilizes their Dual-Mode muscle levers as mechanical stimulators to provide a precise, controlled force output for use by researchers measuring neuronal response to touch, pain and stretch. Furthermore, many neurophysiologists study an interdisciplinary field of neuroscience and muscle physiology looking at neural activation and sensory feedback of muscle tissue. Aurora Scientific’s Dual-Mode levers aid in characterizing muscle mechanics in models of neural regeneration and disease.
Key Aurora Scientific neuroscience research applications are listed below.
Olfaction
Understanding how the brain and nervous system process olfactory stimuli requires very precise instrumentation. Odor stimuli are incredibly dynamic as their profile and composition can move and change very quickly. Aurora Scientific instrumentation has been used by multiple Nobel Laureates to sense and quantify olfactory stimulus dynamics with the highest temporal resolution available.
Common Applications:
- neural response
- odour dynamics
- temporal coding
- olfactory repair
Popular Systems:
Suggested Resources:
- Singh et al. “Combinatorial encoding of odors in the mosquito antennal lobe” Nature Communications (2023) DOI: 10.1038/s41467-023-39303-w
- Schoonover et al. “Representational drift in primary olfactory cortex” Nature (2021) DOI: 10.1038/s41586-021-03628-7
- Schoonover et al. “Representational drift in primary olfactory cortex” Nature (2021) DOI: 10.1038/s41586-021-03628-7
Pheromone & Plume Tracking
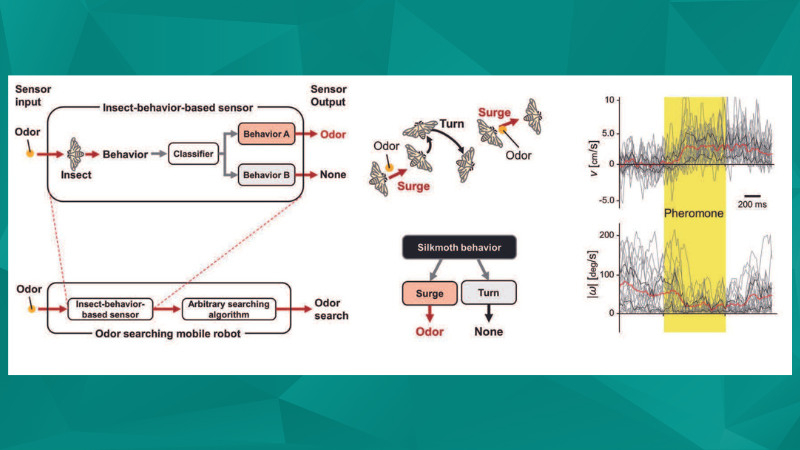
The way insects and animals are able to track plumes and pheromones has far reaching implications on the survival of crops, the balance of the species and ultimately humanity. Tracking and understanding how these dynamic stimuli behave requires sensitive instruments with high temporal resolution. Aurora Scientific has designed specialized instruments specifically for plume tracking research.
Common Applications:
- odor plume tracking
- insect flight behaviour
- pheromone trails
- robotic plume tracking
- source location
- plume release
Popular Systems:
Suggested Resources:
- Saha et al. “Explosive sensing with insect-based biorobots” Biosensors and Bioelectronics: X (2020) DOI: 10.1016/j.biosx.2020.100050
- Farnum et al. “Harnessing insect olfactory neural circuits for detecting and discriminating human cancers” Biosensors and Bioelectronics (2023) DOI: 10.1016/j.bios.2022.114814
- Horibe et al. “Odor-searching Robot with Insect-behavior-based Olfactory Sensor” Sensors and Materials (2021) DOI: 10.18494/sam.2021.3369
Pain & Nociception
To understand neural responses such as pain and touch, it is necessary to apply and mimic tactile stimuli in a manner that is repeatable. Inevitable variability comes with the application of manual stimuli through the use of conventional von Frey hairs. Leading researchers in the field of nociception trust Aurora Scientific mechanical stimulators because they are versatile enough for use in a broad range of protocols and provide precise, reproducible results.
Common Applications:
- pain & sensory research
- mechanical nociception
- tactile discrimination
- neural communication
- vibrotactile stimuli
Popular Systems:
Suggested Resources:
- Yamada et al. “Properties of Nav1.8ChR2-positive and Nav1.8ChR2-negative afferent mechanoreceptors in the hindpaw glabrous skin of mice” Molecular Brain (2023) DOI: 10.1186/s13041-023-01015-z
- Moayedi et al. “The cellular basis of mechanosensation in mammalian tongue” Cell Reports (2023) DOI: 10.1016/j.celrep.2023.112087
- Meltzer et al. “γ-Protocadherins control synapse formation and peripheral branching of touch sensory neurons” Neuron (2023) DOI: 10.1016/j.neuron.2023.03.012
Explore Neuroscience Content
Best of 2023: Across Countries and Applications
2023 has proved to be a particularly fruitful year for scientific discovery, with a multitude of pioneering studies spanning continents and disciplines. From the intricate workings of muscle physiology in Switzerland to the nuanced understanding of migraine mechanisms in the USA, the discernment of mosquito olfactory processing in India, and the innovative strides in sustainable materials science in Germany and Austria, this year's research highlights embody the spirit of global collaboration and scientific ingenuity. We hope that, by highlighting the multitude of ways our instruments provide precise and reliable data, future and current researchers can draw inspiration for new and innovative ways to collaborate across borders.
Scents of Security: Emerging Olfaction Applications with Biorobots
The following publication review showcases several new and exciting findings in the olfactory sciences, highlighting how our instruments helped these researchers stir up the lab. The natural world often serves as inspiration for innovation, and insects – specifically their olfactory systems – have become a recent research topic of interest. Given the remarkable sensitivity of insect odor detection systems, the potential applications of this budding field are numerous.
Neuronal Reorganization in Response to Odor
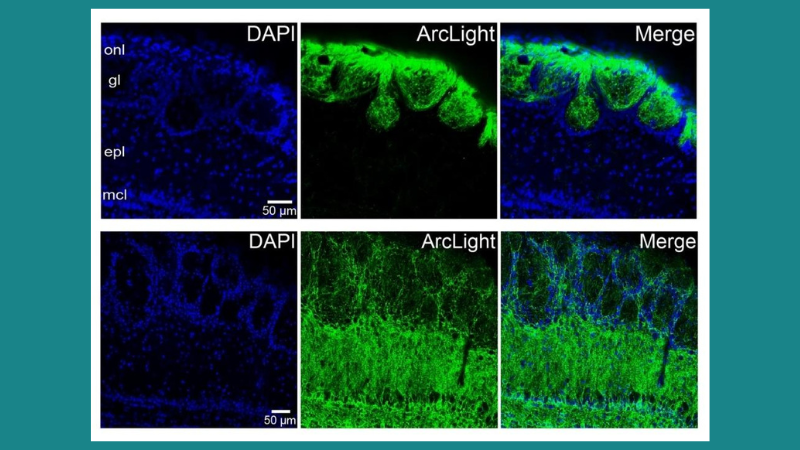
This publication review takes a look at two recent studies that examined the mouse olfactory bulb with help from Aurora Scientific olfaction instruments.
Best of 2021: Neuroscience – Olfaction and Somatosensation
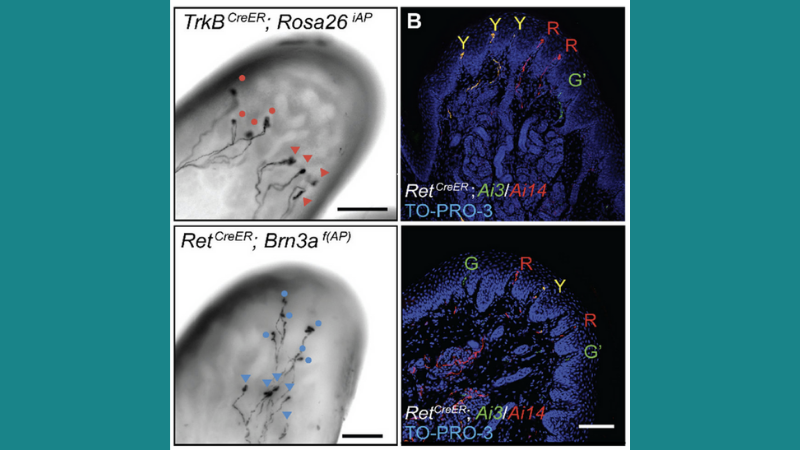
Spatial arrangement of Ret+ and TrkB+ Meissner afferent cutaneous endings. Image courtesy of Neubarth et al., 2020. This publication review summarizes some of the