There is a new version of this product available. Check out the 300E-I Mechanical Stimulators!
300C-I: Dual-Mode Indenters
The 300C-I mechanical stimulator is an automated electronic von Frey device with the added capability to measure and control both force and length at a single application point. The 300C-I takes the variability and awkwardness out of applying force with a handheld von Frey filament or with other handheld mechanical stimulators. Our computer-controlled mechanical stimulator removes the unavoidable hand tremor associated with both von Frey filaments and other electronic von Frey systems. This removes the associated variation in force application.
Aurora Scientific’s mechanical stimulator increases throughput by eliminating the need for multiple tests to determine threshold. The force application and timing of the stimulus is consistent and precise, thereby removing the variability associated with handheld devices.
The mechanical stimulator is capable of applying constant force for pre-set periods of time with the added functionality of adjusting force at pre-determined rates. Stimulation can be applied in any combination of length or force and can follow an arbitrary force or distance application curve so force application is not limited to simple force ramps.
The delivery of constant and repeatable force ensures that consistency is maintained between experiments, subjects and studies, thus reducing avoidable error in your data and improving the quality of your findings.



Variants
2 Channel Mechanical Stimulator Variants:
300D-300I-300I: 2 Channel Mechanical Stimulator – both 300C-I
300D-300I-305I: 2 Channel Mechanical Stimulator – one 300C-I, one 305C-I
300D-305I-305I: 2 Channel Mechanical Stimulator – both 305C-I
Stories of Success
Customized 300C-I Facilitates Migraine Headache Research
CHALLENGE
In 2002 Dr. Dan Levy of Harvard University was studying the underlying mechanisms of migraine headaches and was looking for a method to reliably apply varying forces to sensory neurons innervating the dura mater of a rat.
Because these stimuli needed to be applied as a precise square wave, conventional, hand-held von Frey filaments could not be used. Additionally, these neurons were highly sensitive to applied pressure and limiting the area activated was a challenge.
SOLUTION
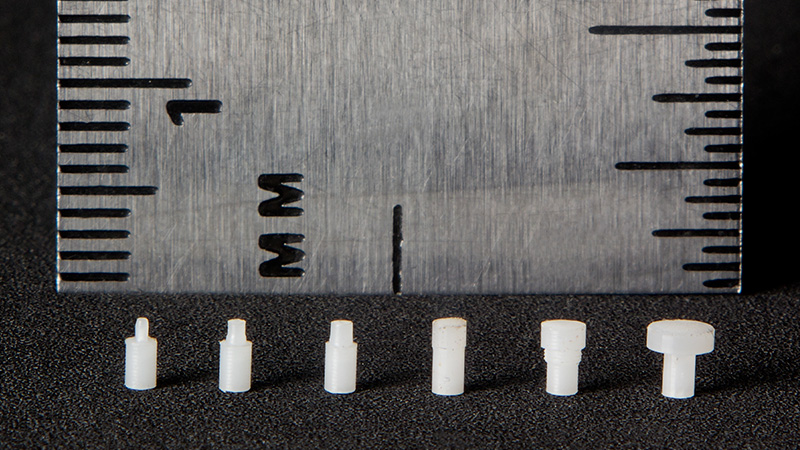
A customized version of our Dual-Mode lever systems, now the 300C-I mechanical stimulator, proved to be exactly what was required. Although our Dual-Mode lever system had been used by other researchers to apply mechanical stimuli in the past, Dr. Levy’s challenging samples required some customization. Teflon tips of specific diameters were manufactured in order to mechanically activate specific innervation sites within the dura mater. Additionally, to address the pressure sensitivity of these neurons, a customized lever arm for the instrument was built, to push the boundaries of the forces that could be applied.
RESULTS
The mechanical stimulator has been an integral part of Dr. Levy’s lab for over a decade. It has helped him extensively publish his findings about numerous types of headaches and explore several mechanisms and pathways which may underlie chronic and acute migraines. Dr. Levy continues to investigate potential treatment options targeting these pathways which may lead to helping those who suffer.
300C-I – Mechanical Stimulation of Rat Skin
CHALLENGE
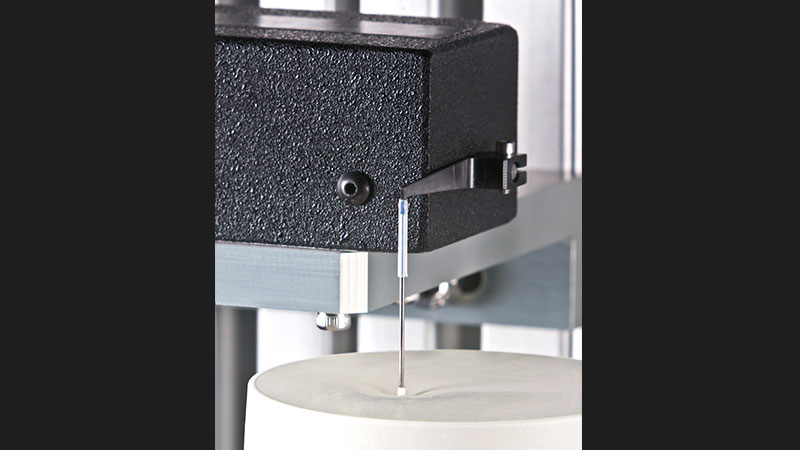
In 1998 Dr. Woodbury approached us with a need to perform mechanical stimulation of rat skin stretched in a recording chamber. He needed a computer controlled mechanical stimulator that could produce controlled five second square waves of varying forces through a cylindrical indenter tip.
The design of the recording chamber meant that the mechanical stimulator had to be located above and to the side of the skin preparation.
SOLUTION
Aurora Scientific knew that a 300C Dual-Mode muscle lever would be able to provide the mechanical stimulation required while also allowing Dr. Woodbury to record both indentation distance and force. However, the location of the 300C motor meant that our normal lever arm could not be used to apply the desired forces. Therefore, an indenter arm was developed which had a vertical shaft attached to it to allow for versatile placement. Reduction of arm inertia became important due to issues which arose while tuning the 300C and after several attempts, an arm design and appropriate tuning settings were determined.
RESULTS
A 300C-I mechanical stimulator was provided to Dr. Woodbury which delivered stable and precise stimulation of his tissue preparation. The custom designed indenter arm allowed him to position the motor above and to the side of his recording chamber to properly stimulate the stretched rat skin. Dr. Woodbury has used the 300C-I in his the lab for numerous impactful studies of nociceptive and thermoreceptive systems.
Osteoarthritic Cartilage Loading with 2-Channel Mechanical Stimulator
CHALLENGE
Located in Department of Internal Medicine at Rush University, Dr. Rachel Miller studies the biomechanical pathways involved in Osteoarthritis pain. As a member of the Laboratory for Translational Research in Osteoarthritis, Dr. Miller is dedicated to elucidating these mechanisms that lead to debilitating pain in patients suffering from osteoarthritis, particularly in the knee joint. Dr. Miller approached Aurora Scientific as she was interested in a number of distinct applications centred on cartilage loading under an inverted microscope, from monolayer neuron cultures to intact animals.
Often a stepper motor has been used in areas such as this to indent tissue, however it was imperative that Dr. Miller be able to measure and visualize when the tissue is being mechanically stimulated with force feedback, something a stepper motor does not provide. Another caveat was that the attachments between our indenter and the animal tissue needed to be extremely lightweight yet rigid to negate any oscillations in the system. Because of the wide range of forces and resolution requirements, a single mechanical stimulator wouldn’t be feasible.
SOLUTION
Dr. Miller consulted with Aurora Scientific and discussed in depth the challenges and requirements of her proposed applications. Because this was a new application area, together we decided it would be best to have Dr. Miller test one of our mechanical stimulators to ensure it was the right choice. Aurora Scientific travelled to Dr. Miller’s lab to aid in testing and to optimize the system’s configurations. After running a number of experiments, we determined the best solution would be our 300D 2-Channel Mechanical Stimulator which provides two independent indenters, each with optimal specifications, to cover the resolution and force range necessary for her cartilage loading experiments. The first channel would provide a low force (0.5N), high resolution (1 micron) solution for monolayer neuron cultures. In contrast, the second channel would consist of a larger force (5N) Indenter with greater stability for custom-fabricated attachments and tissue weights while also providing outstanding resolution (1 micron) for small, measurable stimulation.
RESULTS
With Dr. Miller’s engineering background and the help of Aurora Scientific, she was able to fabricate a number of rigid, lightweight attachments for her mechanical stimulators. This permitted her to be able to secure a mouse femur upright and vertically indent intact knee cartilage onto a glass coverslip while simultaneously imaging cell response. Because of this, Dr. Miller’s lab has been able to test out a number of different setups and optimize them for future projects including stimulation of her monolayer neuron cultures embedded in gel. This leads to the exciting proposition of mechanically stimulating the knee joint of intact mice while simultaneously imaging from dorsal root ganglion neurons to elucidate the central pain sensing mechanisms involved in Osteoarthritis.
Select References
- Meltzer et al. “γ-Protocadherins control synapse formation and peripheral branching of touch sensory neurons” Neuron (2023) DOI: 10.1016/j.neuron.2023.03.012
- Kumar, Siddarth. et al. “Viscoelastic characterization of the primate finger pad in vivo by microstep indentation and three-dimensional finite element models for tactile sensation studies .” Journal of Biomechanical Engineering (2015) DOI: 10.1115/1.4029985
- Schwaller et al. “USH2A is a Meissner’s corpuscle protein necessary for normal vibration sensing in mice and humans” Nature Neuroscience (2021) DOI: 10.1038/s41593-020-00751-y
- Schwaller et al. “USH2A is a Meissner’s corpuscle protein necessary for normal vibration sensing in mice and humans” Nature Neuroscience (2021) DOI: 10.1038/s41593-020-00751-y
- Bove, Geoffrey M., Daniel R. Robichaud, and Peter Grigg. “Three-dimensional load analysis of indentation stimulators.” Journal of Neuroscience Methods (2003) DOI: 10.1016/s0165-0270(02)00326-6
- Hill et al. “The signaling lipid sphingosine 1-phosphate regulates mechanical pain” eLife (2018) DOI: 10.7554/eLife.33285
- Moayedi et al. “The cellular basis of mechanosensation in mammalian tongue” Cell Reports (2023) DOI: 10.1016/j.celrep.2023.112087
- Molliver, Derek C. et al. “The ADP receptor P2Y1 is necessary for normal thermal sensitivity in cutaneous polymodal nociceptors.” Molecular Pain (2011) DOI: 10.1186/1744-8069-7-13
- Jeon et al. “Skin Reinnervation by Collateral Sprouting Following Spared Nerve Injury in Mice” Journal of Neuroscience (2024) DOI: 10.1523/JNEUROSCI.1494-23.2024
- Yamada et al. “Properties of Nav1.8ChR2-positive and Nav1.8ChR2-negative afferent mechanoreceptors in the hindpaw glabrous skin of mice” Molecular Brain (2023) DOI: 10.1186/s13041-023-01015-z
Specifications
| Length Specifications | 300C-I | 300C-LR-I | 305C-I | 305C-LR-I |
|---|---|---|---|---|
| Indenter Arm Length [cm] | 3.0 | 3.0 | 4.0 | 4.0 |
| Length Excursion [mm] | 10.0 | 10.0 | 20.0 | 20.0 |
| Length Signal Resolution [micron] | 1.0 | 1.0 | 1.0 | 1.0 |
| Length Scale Factor [mm/Volt ±2%] | 0.5 | 0.5 | 1.0 | 1.0 |
| Length Signal Linearity1 [%] | 99.9 | 99.9 | 99.9 | 99.9 |
| Length Step Response Time2 [millisecond] | 1.3 | 1.3 | 2.0 | 2.0 |
| Sinusoidal Frequency Response3 [Hz] | 530 | 530 | 300 | 300 |
1 = Over full length excursion; 2 = 1 to 99%, critically damped; 3 = -3dB point
| Force Specifications | 300C-I | 300C-LR-I | 305C-I | 305C-LR-I |
|---|---|---|---|---|
| Maximum Force [N] | 0.5 | 1.0 | 0.5 | 10.0 |
| Force Signal Resolution [mN] | 0.3 | 0.6 | 1.0 | 2.0 |
| Force Scale Factor [mN/Volt ±2%] | 50 | 100 | 500 | 1,000 |
| Force Signal Linearity1 [%] | 99.8 | 99.8 | 99.8 | 99.8 |
| Force Step Response Time2 [millisecond] | 1.3 | 1.3 | 2.0 | 2.0 |
| System Friction3 [mN] | 0.8 | 0.8 | 3.0 | 3.0 |
4 = Over full length excursion; 5 = 1 to 99%, critically damped; 6 = Over full length excursion
| General Specifications | 300C-I | 300C-LR-I | 305C-I | 305C-LR-I |
|---|---|---|---|---|
| Power Required | 100, 120, 220, 240 VAC, 50/60 Hz. Available | |||
| Power Consumption [W] | 120 | 150 | 180 | 300 |
| Controller Weight [kg] | 8 | 8 | 8 | 8 |
| Motor Weight [kg] | 0.32 | 0.32 | 1 | 1 |
| Controller Dimensions [cm] | 48W (standard 19” rack mount) x 32D x 13H (3U) |
Explore Further

Industry Insights with Chris Rand from Aurora Scientific
Chris Rand, MSc, Sales and Marketing Manager, delves into the start and evolution of Aurora Scientific on this episode of #ShareScience, and our journey within the preclinical research world. He also ...
Learn More
What Hurts the Most? Mechanical Stimulation Made Easy with the 300C-I
The 220A Olfactometer by Aurora Scientific has been updated and during this tech cast, Chris takes viewers through live demonstrations while sharing tips, tricks and best practices for optimal ...
Learn More