Neuroscience Applications
Aurora Scientific has developed innovative test systems used in olfactory research to validate odors presented to specimens and to track pheromone and plume dispersion. In addition, Aurora Scientific utilizes their Dual-Mode muscle levers as mechanical stimulators to provide a precise, controlled force output for use by researchers measuring neuronal response to touch, pain and stretch. Furthermore, many neurophysiologists study an interdisciplinary field of neuroscience and muscle physiology looking at neural activation and sensory feedback of muscle tissue. Aurora Scientific’s Dual-Mode levers aid in characterizing muscle mechanics in models of neural regeneration and disease.
Key Aurora Scientific neuroscience research applications are listed below.
Olfaction
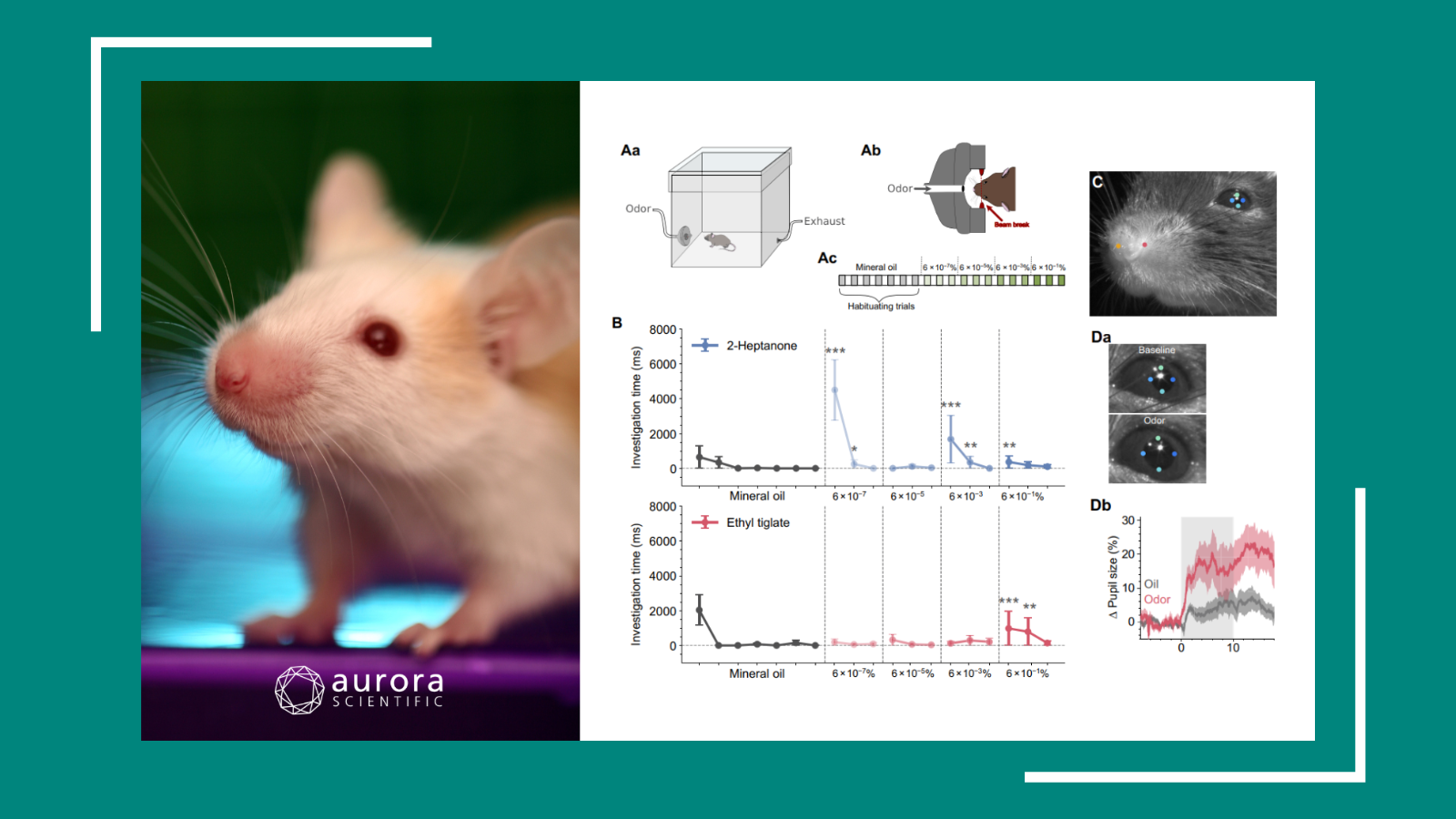
Understanding how the brain and nervous system process olfactory stimuli requires very precise instrumentation. Odor stimuli are incredibly dynamic as their profile and composition can move and change very quickly. Aurora Scientific instrumentation has been used by multiple Nobel Laureates to sense and quantify olfactory stimulus dynamics with the highest temporal resolution available.
Common Applications:
- neural response
- odour dynamics
- temporal coding
- olfactory repair
Popular Systems:
Suggested Resources:
- Bellafard et al. “Volatile working memory representations crystallize with practice” Nature (2024) DOI: 10.1038/s41586-024-07425-w
- True et al. “Structure of dense plumes from a finite-height cylinder in laminar crossflow” Environmental Fluid Mechanics (2024) DOI: 10.1007/s10652-024-10006-0
- Petelski et al. “Synergistic olfactory processing for social plasticity in desert locusts” Nature Communications (2024) DOI: 10.1038/s41467-024-49719-7
Pheromone & Plume Tracking
The way insects and animals are able to track plumes and pheromones has far reaching implications on the survival of crops, the balance of the species and ultimately humanity. Tracking and understanding how these dynamic stimuli behave requires sensitive instruments with high temporal resolution. Aurora Scientific has designed specialized instruments specifically for plume tracking research.
Common Applications:
- odor plume tracking
- insect flight behaviour
- pheromone trails
- robotic plume tracking
- source location
- plume release
Popular Systems:
Suggested Resources:
- Barta et al. “Stimulus duration encoding occurs early in the moth olfactory pathway” Communications biology (2024) DOI: 10.1038/s42003-024-06921-z
- Lehmann et al. “SNMP1 is critical for sensitive detection of the desert locust aromatic courtship inhibition pheromone phenylacetonitrile” BMC Biology (2024) DOI: 10.1186/s12915-024-01941-x
- Pang et al. “Measurements of buoyant plumes in a turbulent boundary layer” Experiments in Fluids (2024) DOI: 10.1007/s00348-024-03941-7
Pain & Nociception
To understand neural responses such as pain and touch, it is necessary to apply and mimic tactile stimuli in a manner that is repeatable. Inevitable variability comes with the application of manual stimuli through the use of conventional von Frey hairs. Leading researchers in the field of nociception trust Aurora Scientific mechanical stimulators because they are versatile enough for use in a broad range of protocols and provide precise, reproducible results.
Common Applications:
- pain & sensory research
- mechanical nociception
- tactile discrimination
- neural communication
- vibrotactile stimuli
Popular Systems:
Suggested Resources:
- Jeon et al. “Skin Reinnervation by Collateral Sprouting Following Spared Nerve Injury in Mice” Journal of Neuroscience (2024) DOI: 10.1523/JNEUROSCI.1494-23.2024
- Qi et al. “Krause corpuscles are genital vibrotactile sensors for sexual behaviours” Nature (2024) DOI: 10.1038/s41586-024-07528-4
- Yang et al. “Establishment of a Magnetically Controlled Scalable Nerve Injury Model” Advanced Science (2024) DOI: 10.1002/advs.202405265
Explore Neuroscience Content
Scent-imental Strides: Recent Olfaction Discoveries
The Canadian Neuroscience Meeting (CAN) is hosted in a different Canadian city each year, welcoming in researchers from across the country and beyond. In a scent-imental tribute to our inaugural CAN ...

Best of 2024: Intricate Advancements
As 2024 draws to a close, the following publication review features a collection of selected studies from our annual short-list. From uncovering the evolutionary novelties of sound production in ...
Scent-sational Developments in Neuroscience
In anticipation for ISOT 2024, taking place every 4 years, June's publication review encompasses a proof-of-concept for a novel biological sensor and novel insights into odour perception in the ...
Best of 2023: Across Countries and Applications
2023 has proved to be a particularly fruitful year for scientific discovery, with a multitude of pioneering studies spanning continents and disciplines. From the intricate workings of muscle ...